Pure Convection : The Rotating Hill
Summary: Here we will present two methods for upwinding for the simplest convection problem. We will learn about Characteristics-Galerkin and Discontinuous-Galerkin Finite Element Methods.
Let \(\Omega\) be the unit disk centered at \((0,0)\); consider the rotation vector field
Pure convection by \(\mathbf{u}\) is
The exact solution \(c(x_t,t)\) at time \(t\) en point \(x_t\) is given by:
where \(x_t\) is the particle path in the flow starting at point \(x\) at time \(0\). So \(x_t\) are solutions of
The ODE are reversible and we want the solution at point \(x\) at time \(t\) ( not at point \(x_t\)) the initial point is \(x_{-t}\), and we have
The game consists in solving the equation until \(T=2\pi\), that is for a full revolution and to compare the final solution with the initial one; they should be equal.
Solution by a Characteristics-Galerkin Method
In FreeFEM there is an operator called convect([u1,u2], dt, c) which compute \(c\circ X\) with \(X\) is the convect field defined by \(X(x)= x_{dt}\) and where \(x_\tau\) is particule path in the steady state velocity field \(\mathbf{u}=[u1,u2]\) starting at point \(x\) at time \(\tau=0\), so \(x_\tau\) is solution of the following ODE:
When \(\mathbf{u}\) is piecewise constant; this is possible because \(x_\tau\) is then a polygonal curve which can be computed exactly and the solution exists always when \(\mathbf{u}\) is divergence free; convect returns \(c(x_{df})=C\circ X\).
1// Parameters
2real dt = 0.17;
3
4// Mesh
5border C(t=0., 2.*pi) {x=cos(t); y=sin(t);};
6mesh Th = buildmesh(C(100));
7
8// Fespace
9fespace Uh(Th, P1);
10Uh cold, c = exp(-10*((x-0.3)^2 +(y-0.3)^2));
11Uh u1 = y, u2 = -x;
12
13// Time loop
14real t = 0;
15for (int m = 0; m < 2.*pi/dt; m++){
16 t += dt;
17 cold = c;
18 c = convect([u1, u2], -dt, cold);
19 plot(c, cmm=" t="+t +", min="+c[].min+", max="+c[].max);
20}
Note
3D plots can be done by adding the qualifyer dim=3 to the plot instruction.
The method is very powerful but has two limitations:
it is not conservative
it may diverge in rare cases when \(|\mathbf{u}|\) is too small due to quadrature error.
Solution by Discontinuous-Galerkin FEM
Discontinuous Galerkin methods take advantage of the discontinuities of \(c\) at the edges to build upwinding. There are may formulations possible. We shall implement here the so-called dual-\(P_1^{DC}\) formulation (see [ERN2006]):
where \(E\) is the set of inner edges and \(E_\Gamma^-\) is the set of boundary edges where \(u\cdot n<0\) (in our case there is no such edges). Finally \([c]\) is the jump of \(c\) across an edge with the convention that \(c^+\) refers to the value on the right of the oriented edge.
1// Parameters
2real al=0.5;
3real dt = 0.05;
4
5// Mesh
6border C(t=0., 2.*pi) {x=cos(t); y=sin(t);};
7mesh Th = buildmesh(C(100));
8
9// Fespace
10fespace Vh(Th,P1dc);
11Vh w, ccold, v1 = y, v2 = -x, cc = exp(-10*((x-0.3)^2 +(y-0.3)^2));
12
13// Macro
14macro n() (N.x*v1 + N.y*v2) // Macro without parameter
15
16// Problem
17problem Adual(cc, w)
18 = int2d(Th)(
19 (cc/dt+(v1*dx(cc)+v2*dy(cc)))*w
20 )
21 + intalledges(Th)(
22 (1-nTonEdge)*w*(al*abs(n)-n/2)*jump(cc)
23 )
24 - int2d(Th)(
25 ccold*w/dt
26 )
27 ;
28
29// Time iterations
30for (real t = 0.; t < 2.*pi; t += dt){
31 ccold = cc;
32 Adual;
33 plot(cc, fill=1, cmm="t="+t+", min="+cc[].min+", max="+ cc[].max);
34}
35
36// Plot
37real [int] viso = [-0.2, -0.1, 0., 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1., 1.1];
38plot(cc, wait=1, fill=1, ps="ConvectCG.eps", viso=viso);
39plot(cc, wait=1, fill=1, ps="ConvectDG.eps", viso=viso);
Note
New keywords: intalledges to integrate on all edges of all triangles
(so all internal edges are see two times), nTonEdge which is one if the triangle has a boundary edge and two otherwise, jump to implement \([c]\).
Results of both methods are shown on Fig. 17 nad Fig. 18 with identical levels for the level line; this is done with the plot-modifier viso.
Notice also the macro where the parameter \(\mathbf{u}\) is not used (but the syntax needs one) and which ends with a //; it simply replaces the name n by (N.x*v1+N.y*v2).
As easily guessed N.x,N.y is the normal to the edge.
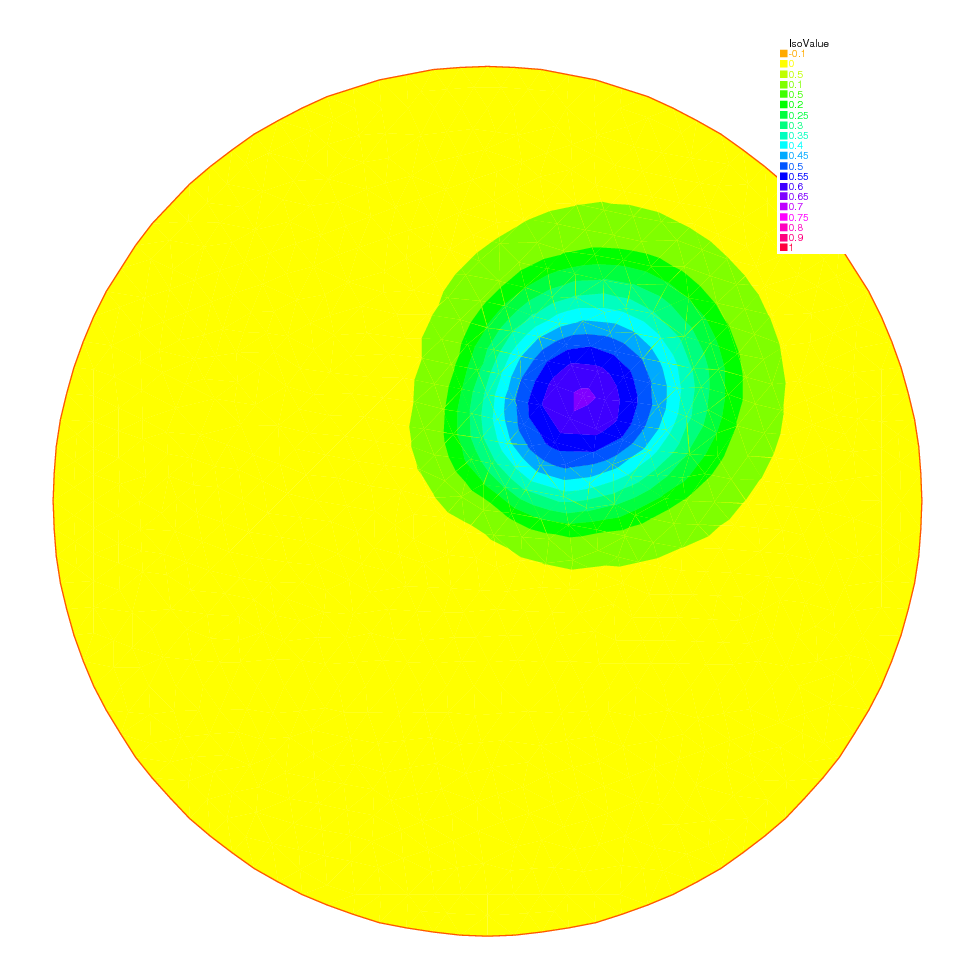
Fig. 17 The rotating hill after one revolution with Characteristics-Galerkin
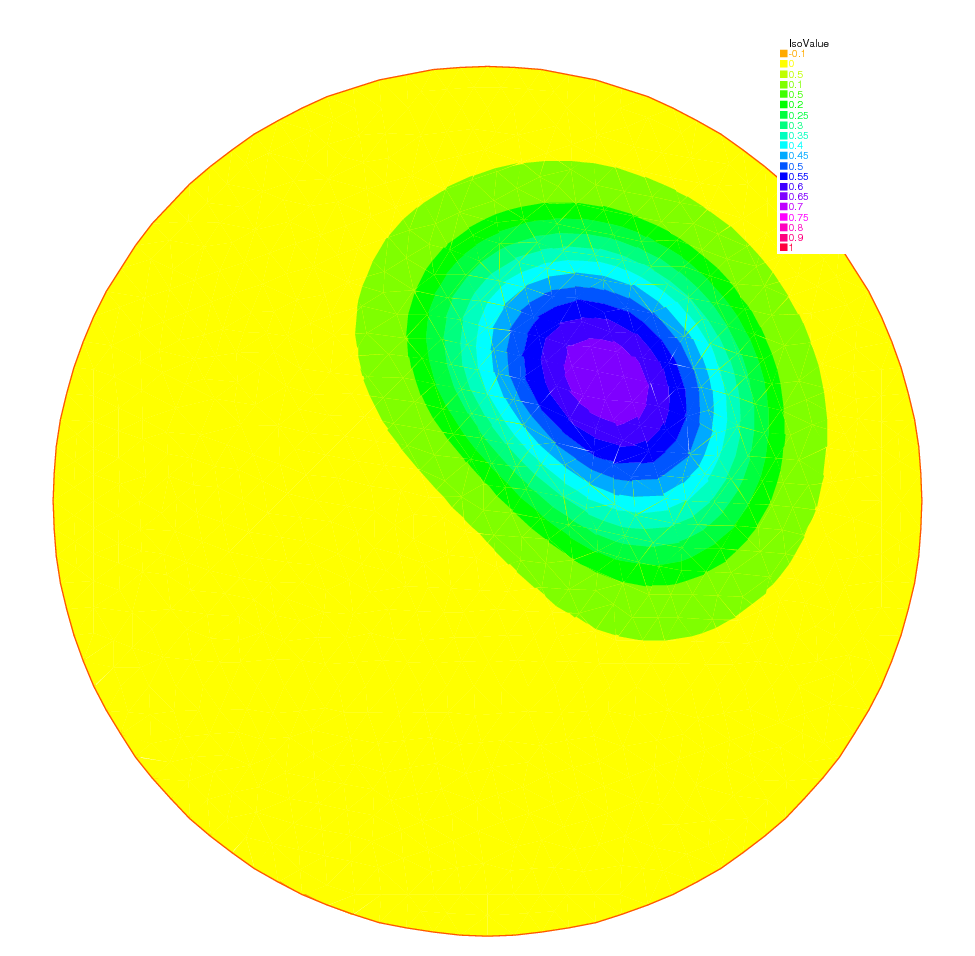
Fig. 18 The rotating hill after one revolution with Discontinuous \(P_1\) Galerkin
Rotating hill
Now if you think that DG is too slow try this:
1// Mesh
2border C(t=0., 2.*pi) {x=cos(t); y=sin(t);};
3mesh Th = buildmesh(C(100));
4
5fespace Vh(Th,P1);//P1,P2,P0,P1dc,P2dc, uncond stable
6
7Vh vh,vo,u1 = y, u2 = -x, v = exp(-10*((x-0.3)^2 +(y-0.3)^2));
8real dt = 0.03,t=0, tmax=2*pi, al=0.5, alp=200;
9
10problem A(v,vh) = int2d(Th)(v*vh/dt-v*(u1*dx(vh)+u2*dy(vh)))
11 + intalledges(Th)(vh*(mean(v)*(N.x*u1+N.y*u2)
12 +alp*jump(v)*abs(N.x*u1+N.y*u2)))
13 + int1d(Th,1)(((N.x*u1+N.y*u2)>0)*(N.x*u1+N.y*u2)*v*vh)
14 - int2d(Th)(vo*vh/dt);
15
16varf Adual(v,vh) = int2d(Th)((v/dt+(u1*dx(v)+u2*dy(v)))*vh)
17 + intalledges(Th)((1-nTonEdge)*vh*(al*abs(N.x*u1+N.y*u2)
18 -(N.x*u1+N.y*u2)/2)*jump(v));
19
20varf rhs(vo,vh)= int2d(Th)(vo*vh/dt);
21
22real[int] viso=[-0.1,0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,1.1];
23
24matrix AA=Adual(Vh,Vh,solver=GMRES);
25matrix BB=rhs(Vh,Vh);
26
27for ( t=0; t< tmax ; t+=dt)
28{
29 vo[]=v[];
30 vh[]=BB*vo[];
31 v[]=AA^-1*vh[];
32 plot(v,fill=0,viso=viso,cmm=" t="+t + ", min=" + v[].min + ", max=" + v[].max);
33};