The Boundary Element Method
Introduction to the Boundary Element Method (BEM)
This is a short overview of the Boundary Element Method, introduced through a simple model example. For a thorough mathematical description of the Boundary Element Method you can refer to the PhD thesis of Pierre Marchand. Some figures used in this documentation are taken from the manuscript. All BEM examples in FreeFEM can be found in the examples/bem subdirectory.
Model problem
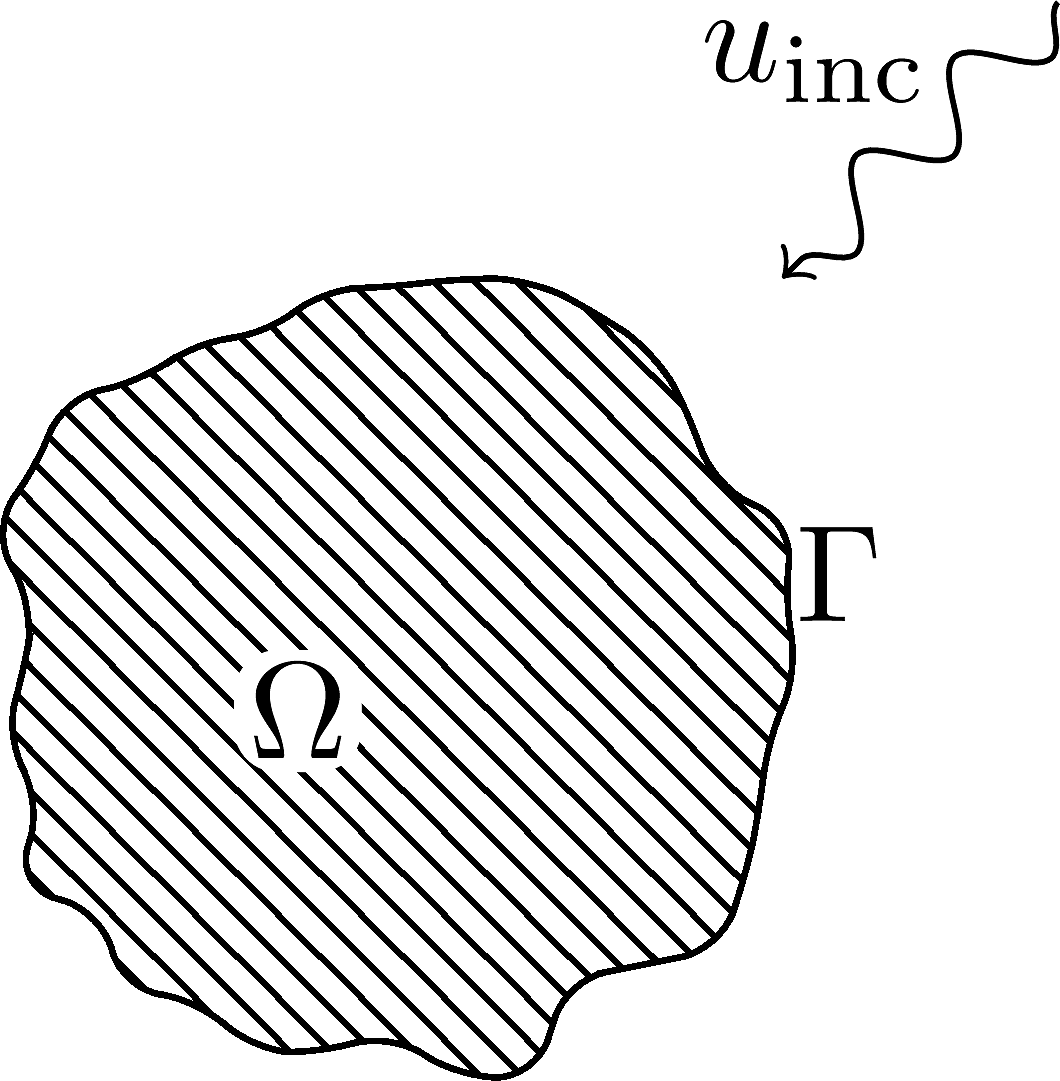
The model problem we consider here is the scattering of an incoming acoustic wave \(u_\text{inc}\) by an obstacle \(\Omega\). Thus, we want to solve the following homogeneous Helmholtz equation written in terms of the scattered field \(u\):
with the Sommerfeld radiation condition at infinity, which states that there can be only outgoing waves at infinity:
and where the total field \(u_\text{tot} = u_\text{inc} + u\).
If the wavenumber \(k\) is constant in \(\mathbb{R}^3 \backslash \Omega\), the boundary element method can be applied. It consists in reformulating the problem in terms of unknowns on the boundary \(\Gamma\) of \(\Omega\).
First, let us introduce the Green kernel \(\mathcal{G}_{k}\), which for the helmholtz equation in 3D is
Let us also introduce the Single Layer Potential \(\operatorname{SL}\), which for any \(q \in H^{-1/2}(\Gamma)\) is defined as
An interesting property of \(\text{SL}\) is that it produces solutions of the PDE at hand in \(\mathbb{R}^3 \backslash \Gamma\) which satisfy the necessary conditions at infinity (here the Helmholtz equation and the Sommerfeld radiation condition).
Thus, we now need to find a so-called ansatz \(p \in H^{-1/2}(\Gamma)\) such that \(\forall \boldsymbol{x} \in \mathbb{R}^3 \backslash \Omega\)
where \(u\) also verifies the Dirichlet boundary condition \(u = - u_\text{inc}\) on \(\Gamma\).
In order to find \(p\), we define a variational problem by multiplying (42) by a test function q and integrating over \(\Gamma\):
Using the Dirichlet boundary condition \(u = - u_\text{inc}\) on \(\Gamma\), we end up with the following variational problem to solve: find \(p : \Gamma \rightarrow \mathbb{C}\) such that
Note that knowing \(p\) on \(\Gamma\), we can indeed compute \(u\) anywhere using the potential formulation (42). Thus, we essentially gained one space dimension, as we only have to solve for \(p : \Gamma \rightarrow \mathbb{C}\) in (43). Another advantage of the boundary element method is that for a given mesh size, it is usually more accurate than the finite element method.
Of course, these benefits of the boundary element method come with a drawback: after discretization of (43), for example with piecewise linear continuous (P1) functions on \(\Gamma\), we end up with a linear system whose matrix is full: because \(\mathcal{G}_{k}(\boldsymbol{x}-\boldsymbol{y})\) never vanishes, every interaction coefficient is nonzero. Thus, the matrix \(A\) of the linear system can be very costly to store (\(N^2\) coefficients) and invert (factorization in \(\mathcal{O}(N^3)\)) (\(N\) is the size of the linear system). Moreover, compared to the finite element method, the matrix coefficients are much more expensive to compute because of the double integral and the evaluation of the Green function \(\mathcal{G}_{k}\). Plus, the choice of the quadrature formulas has to be made with extra care because of the singularity of \(\mathcal{G}_{k}\).
Boundary Integral Operators
In order to formulate our model Dirichlet problem, we have used the Single Layer Potential \(\operatorname{SL}\):
Depending on the choice of the boundary integral formulation or boundary condition, the Double Layer Potential \(\operatorname{DL}\) can also be of use:
Similarly, we have used the Single Layer Operator \(\mathcal{SL}\) in our variational problem
There are three other building blocks that can be of use in the boundary element method, and depending on the problem and the choice of the formulation a boundary integral method makes use of one or a combination of these building blocks:
the Double Layer Operator \(\mathcal{DL}\):
the Transpose Double Layer Operator \(\mathcal{TDL}\):
the Hypersingular Operator \(\mathcal{HS}\):
the BEMTool library
In order to compute the coefficients of the BEM matrix, FreeFEM is interfaced with the boundary element library BEMTool. BEMTool is a general purpose header-only C++ library written by Xavier Claeys, which handles
BEM Potentials and Operators for Laplace, Yukawa, Helmholtz and Maxwell equations
both in 2D and in 3D
1D, 2D and 3D triangulations
\(\mathbb{P}_k\)-Lagrange for \(k = 0,1,2\) and surface \(\mathbb{RT}_0\)
Hierarchical matrices
Although BEMTool can compute the BEM matrix coefficients by accurately and efficiently evaluating the boundary integral operator, it is very costly and often prohibitive to compute and store all \(N^2\) coefficients of the matrix. Thus, we have to rely on a matrix compression technique. To do so, FreeFEM relies on the Hierarchical Matrix, or H-Matrix format.
Low-rank approximation
Let \(\textbf{B} \in \mathbb{C}^{N \times N}\) be a dense matrix. Assume that \(\textbf{B}\) can be written as follows:
where \(r \leq N, \textbf{u}_j \in \mathbb{C}^{N}, \textbf{v}_j \in \mathbb{C}^{N}.\)
If \(r < \frac{N^2}{2 N}\), the computing and storage cost is reduced to \(\mathcal{O}(r N) < \mathcal{O}(N^2)\). We say that \(\textbf{B}\) is low rank.
Usually, the matrices we are interested in are not low-rank, but they may be well-approximated by low-rank matrices. We may start by writing their Singular Value Decomposition (SVD):
where \((\sigma_j)_{j=1}^N\) are the singular values of \(\textbf{B}\) in decreasing order, and \((\textbf{u}_j)_{j=1}^N\) and \((\textbf{v}_j)_{j=1}^N\) its left and right singular vectors respectively.
Indeed, if \(\textbf{B}\) has fast decreasing singular values \(\sigma_j\), we can obtain a good approximation of \(\textbf{B}\) by truncating the SVD sum, keeping only the first \(r\) terms. Although the truncated SVD is actually the best low-rank approximation possible (Eckart-Young-Mirsky theorem), computing the SVD is costly (\(\mathcal{O}(N^3)\)) and requires computing all \(N^2\) coefficients of the matrix, which we want to avoid.
Thankfully, there exist several techniques to approximate a truncated SVD by computing only some coefficients of the initial matrix, such as randomized SVD, or Partially pivoted Adaptive Cross Approximation (partial ACA), which requires only \(2 r N\) coefficients.
Hierarchical block structure
Unfortunately, BEM matrices generally do not have fast decreasing singular values. However, they can exhibit sub-blocks with rapidly decreasing singular values, thanks to the asymptotically smooth nature of the BEM kernel. Let us look for example at the absolute value of the matrix coefficients in the 2D (circle) case below:
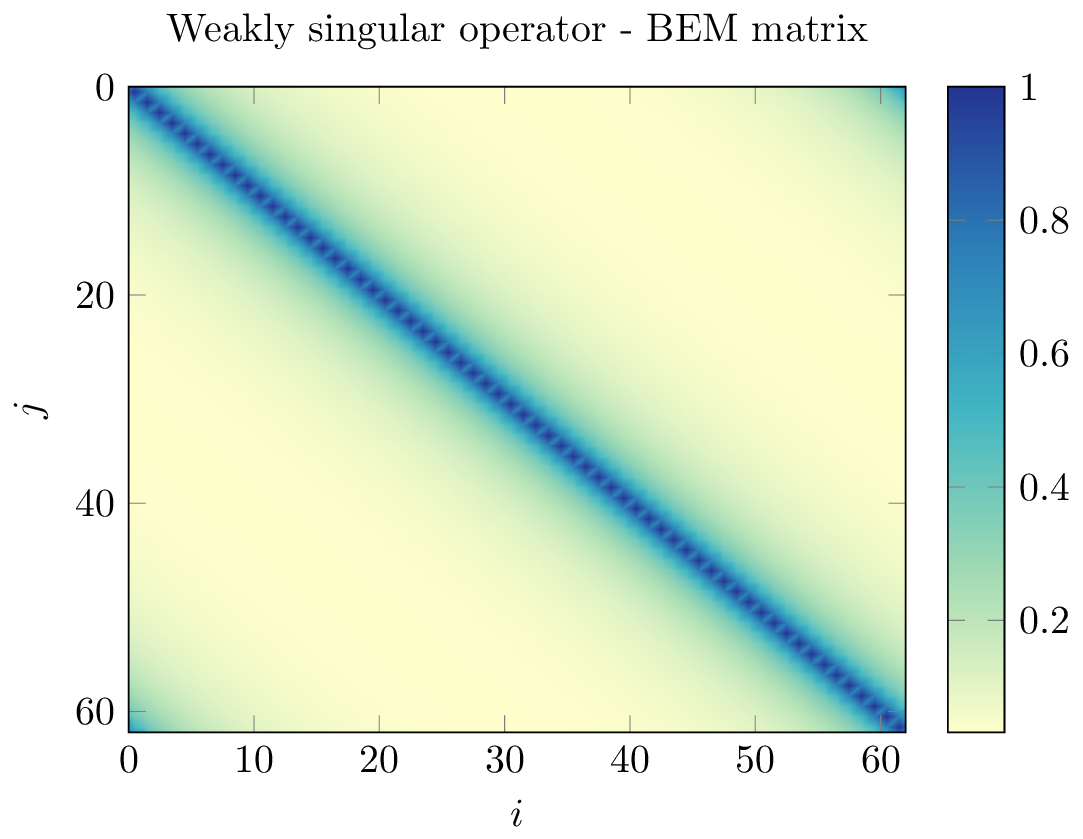
blocks near the diagonal contain information about the near-field interactions, which are not low-rank in nature
blocks away from the diagonal corresponding to the interaction between two clusters of geometric points \(X\) and \(Y\) satisfying the so-called admissibility condition
are far-field interactions and have exponentially decreasing singular values. Thus, they can be well-approximated by low-rank matrices.
The idea is then to build a hierarchical representation of the blocks of the matrix, then identify and compress admissible blocks using low-rank approximation.
We can then build the H-Matrix by taking the following steps:
build a hierarchical partition of the geometry, leading to a cluster tree of the unknowns. It can for example be defined using bisection and principal component analysis.
from this hierarchical clustering, define and traverse the block cluster tree representation of the matrix structure, identifying the compressible blocks using admissibility condition (44)
compute the low-rank approximation of the identified compressible blocks using e.g. partial ACA ; the remaining leaves corresponding to near-field interactions are computed as dense blocks.

The Htool library
the H-Matrix format is implemented in the C++ library Htool-DDM from Marchand et al., (2026). Htool-DDM: A C++ library for parallel solvers and compressed linear systems.. Journal of Open Source Software, 11(118), 9279. Htool is a parallel header-only library written by Pierre Marchand and Pierre-Henri Tournier. It is interfaced with FreeFEM and provides routines to build hierarchical matrix structures (cluster trees, block trees, low-rank matrices, block matrices). It also provides efficient parallel matrix-vector and matrix-matrix product as well as parallel iterative solvers using MPI and OpenMP. Htool is interfaced with BemTool to allow the compression of BEM matrices using the H-Matrix format in FreeFEM.

Solve a BEM problem with FreeFEM
Build the geometry
The geometry of the problem (i.e. the boundary \(\Gamma\)) can be discretized by a line (2D) or surface (3D) mesh:
2D
In 2D, the geometry of the boundary can be defined with the border keyword and discretized by constructing a line or curve mesh of type meshL using buildmeshL:
1border b(t = 0, 2*pi){x=cos(t); y=sin(t);}
2meshL ThL = buildmeshL(b(100));
With the extract keyword, we can also extract the boundary of a 2D mesh (need to load "msh3"):
1load "msh3"
2mesh Th = square(10,10);
3meshL ThL = extract(Th);
or of a meshS ; we can also specify the boundary labels we want to extract:
1load "msh3"
2meshS ThS = square3(10,10);
3int[int] labs = [1,2];
4meshL ThL = extract(ThS, label=labs);
You can find much more information about curve mesh generation here.
3D
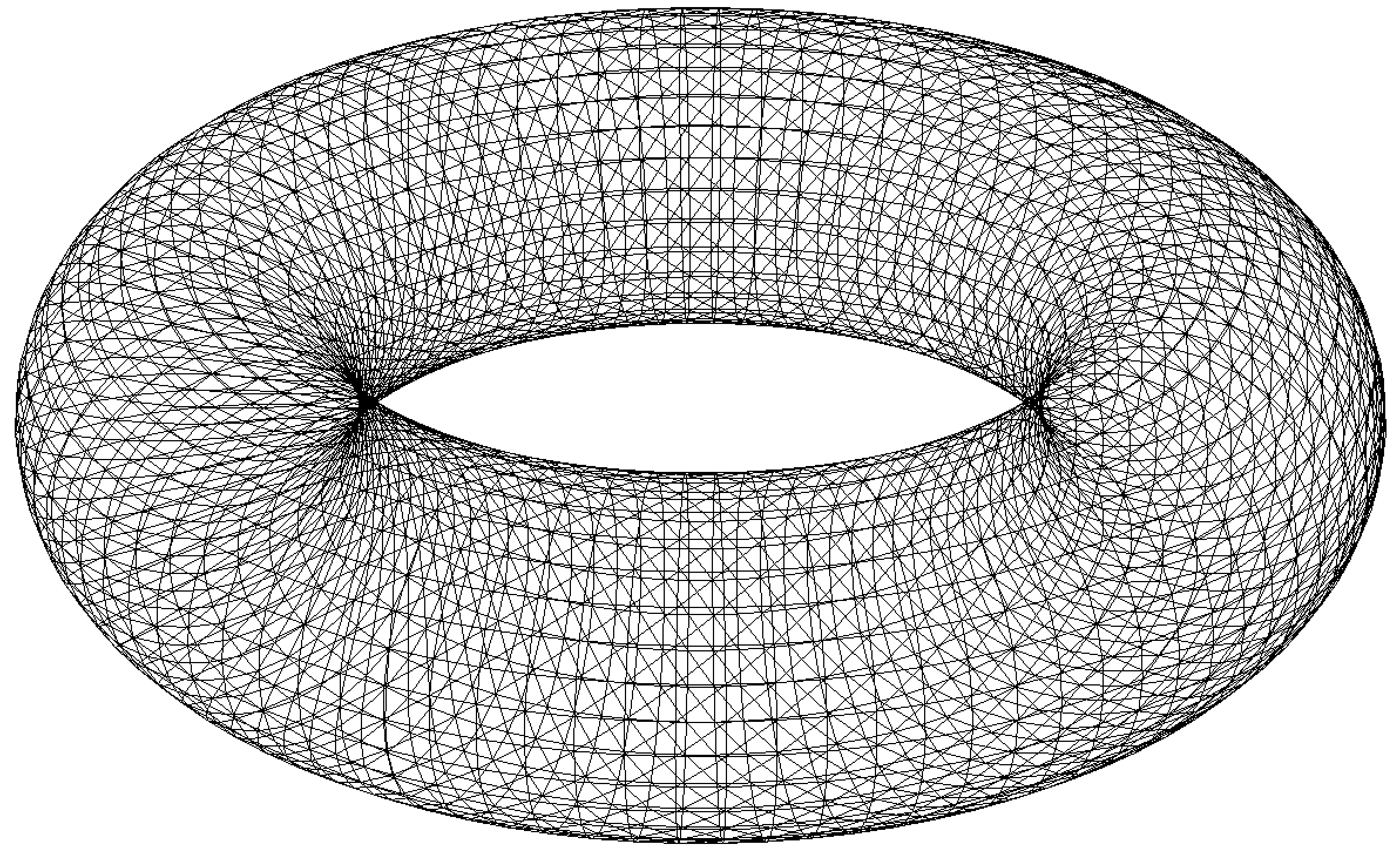
In 3D, the geometry of the boundary surface can be discretized with a surface mesh of type meshS, which can be built by several ways, for example using the square3 constructor:
1load "msh3"
2real R = 3, r=1, h=0.2;
3int nx = R*2*pi/h, ny = r*2*pi/h;
4func torex = (R+r*cos(y*pi*2))*cos(x*pi*2);
5func torey = (R+r*cos(y*pi*2))*sin(x*pi*2);
6func torez = r*sin(y*pi*2);
7meshS ThS = square3(nx,ny,[torex,torey,torez],removeduplicate=true);
or from a 2D mesh using the movemesh23 keyword:
1load "msh3"
2mesh Th = square(10,10);
3meshS ThS = movemesh23(Th, transfo=[x,y,cos(x)^2+sin(y)^2]);
We can also extract the boundary of a mesh3:
1load "msh3"
2mesh3 Th3 = cube(10,10,10);
3int[int] labs = [1,2,3,4];
4meshS ThS = extract(Th3, label=labs);
You can find much more information about surface mesh generation here.
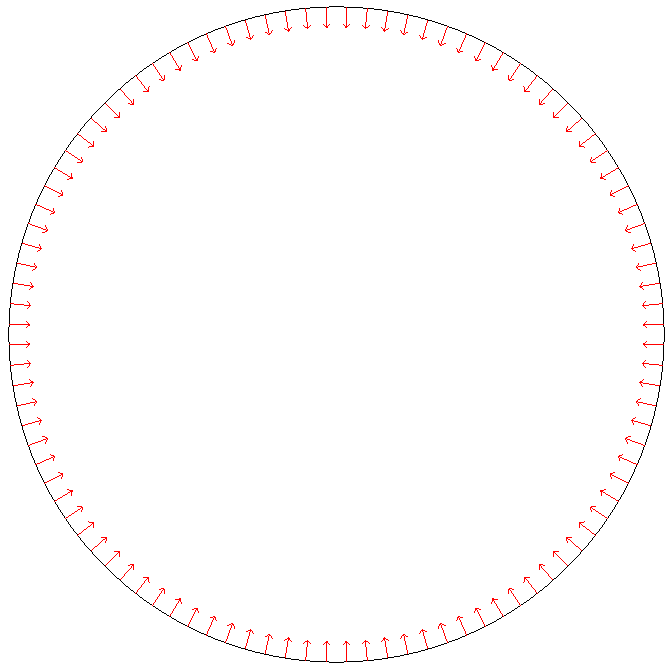
Orientation of normal vector
Depending on whether your problem is posed on a bounded or unbounded domain, you may have to set the orientation of the outward normal vector \(\boldsymbol{n}\) to the boundary. You can use the OrientNormal function with the parameter unbounded set to 0 or 1 (the normal vector \(\boldsymbol{n}\) will then point to the exterior of the domain you are interested in):
1border b(t = 0, 2*pi){x=cos(t); y=sin(t);}
2meshL ThL = buildmeshL(b(100));
3ThL = OrientNormal(ThL,unbounded=1);
4plot(ThL,dim=2);
You can use shift + t on a plot of a boundary mesh to display the outward normal vector \(\boldsymbol{n}\):
Define the type of operator
For now, FreeFEM allows to solve the following PDE with the boundary element method:
with
\(k = 0\) (Laplace)
\(k \in \mathbb{R}^*_+\) (Helmholtz)
\(k \in \imath \mathbb{R}^*_+\) (Yukawa)
FreeFEM can also solve Maxwell’s equations with the Electric Field Integral Equation (EFIE) formulation. More details are given in the section BEM for Maxwell’s equations.
First, the BEM plugin needs to be loaded:
1load "bem"
The information about the type of operator and the PDE can be specified by defining a variable of type BemKernel:
1BemKernel Ker("SL",k=2*pi);
You can choose the type of operator depending on your formulation (see Boundary Integral Operators):
"SL": Single Layer Operator \(\mathcal{SL}\)"DL": Double Layer Operator \(\mathcal{DL}\)"TDL": Transpose Double Layer Operator \(\mathcal{TDL}\)"HS": Hyper Singular Operator \(\mathcal{HS}\)
Define the variational problem
We can then define the variational form of the BEM problem. The double BEM integral is represented by the int1dx1d keyword in the 2D case, and by int2dx2d for a 3D problem. The BEM keyword inside the integral takes the BEM kernel operator as argument:
1BemKernel Ker("SL", k=2*pi);
2varf vbem(u,v) = int2dx2d(ThS)(ThS)(BEM(Ker,u,v));
You can also specify the BEM kernel directly inside the integral:
1varf vbem(u,v) = int2dx2d(ThS)(ThS)(BEM(BemKernel("SL",k=2*pi),u,v));
Depending on the choice of the BEM formulation, there can be additional terms in the variational form. For example, Second kind formulations have an additional mass term:
1BemKernel Ker("HS", k=2*pi);
2varf vbem(u,v) = int2dx2d(ThS)(ThS)(BEM(Ker,u,v)) - int2d(ThS)(0.5*u*v);
We can also define a linear combination of two BEM kernels, which is useful for Combined formulations:
1complex k=2*pi;
2BemKernel Ker1("HS", k=k);
3BemKernel Ker2("DL", k=k);
4BemKernel Ker = 1./(1i*k) * Ker1 + Ker2;
5varf vbem(u,v) = int2dx2d(ThS)(ThS)(BEM(Ker,u,v)) - int2d(ThS)(0.5*u*v);
As a starting point, you can find how to solve a 2D scattering problem by a disk using a First kind, Second kind and Combined formulation, for a Dirichlet (here) and Neumann (here) boundary condition.
Assemble the H-Matrix
Assembling the matrix corresponding to the discretization of the variational form on an fespace Uh is similar to the finite element case, except that we end up with an HMatrix instead of a sparse matrix:
1fespace Uh(ThS,P1);
2HMatrix<complex> H = vbem(Uh,Uh);
Behind the scenes, FreeFEM is using Htool and BEMTool to assemble the H-Matrix.
Note
Since Htool is a parallel library, you need to use FreeFem++-mpi or ff-mpirun to be able to run your BEM script. The MPI parallelism is transparent to the user. You can speed up the computation by using multiple cores:
1ff-mpirun -np 4 script.edp -wg
You can specify the different Htool parameters as below. These are the default values:
1HMatrix<complex> H = vbem(Uh,Uh,
2 compressor = "partialACA", // or "fullACA", "SVD"
3 eta = 10., // parameter for the admissibility condition
4 eps = 1e-3, // target compression error for each block
5 minclustersize = 10, // minimum block side size min(n,m)
6 maxblocksize = 1000000, // maximum n*m block size
7 commworld = mpiCommWorld); // MPI communicator
You can also set the default parameters globally in the script by changing the value of the global variables htoolEta, htoolEpsilon, htoolMinclustersize and htoolMaxblocksize.
Once assembled, the H-Matrix can also be plotted with
1display(H, wait=true);
FreeFEM can also output some information and statistics about the assembly of H:
1if (mpirank == 0) cout << H.infos << endl;
Solve the linear system
Generally, the right-hand-side of the linear system is built as the discretization of a standard linear form:
1Uh<complex> p, b;
2varf vrhs(u,v) = -int2d(ThS)(uinc*v);
3b[] = vrhs(0,Uh);
We can then solve the linear system to obtain \(p\), with the standard syntax:
1p[] = H^-1*b[];
Under the hood, FreeFEM solves the linear system with GMRES with a Jacobi (diagonal) preconditioner.
Compute the solution
Finally, knowing \(p\), we can compute the solution \(u\) of our initial problem (39) using the Potential as in (42). As for the BemKernel, the information about the type of potential can be specified by defining a variable of type BemPotential:
1BemPotential Pot("SL", k=2*pi);
In order to benefit from low-rank compression, instead of using (42) to sequentially compute the value \(u(\boldsymbol{x})\) at each point of interest \(\boldsymbol{x}\), we can compute the discretization of the Potential on a target finite element space UhOut defined on an output mesh ThOut with an H-Matrix.
First, let us define the variational form corresponding to the potential that we want to use to reconstruct our solution. Similarly to the kernel case, the POT keyword takes the potential as argument. Note that we have a single integral, and that v plays the role of \(\boldsymbol{x}\).
1varf vpot(u,v) = int2d(ThS)(POT(Pot,u,v));
We can then assemble the rectangular H-Matrix from the potential variational form:
1fespace UhOut(ThOut,P1);
2HMatrix<complex> HP = vpot(Uh,UhOut);
Computing \(u\) on UhOut is then just a matter of performing the matrix-vector product of HP with p:
1UhOut<complex> u;
2u[] = HP*p[];
3plot(u);
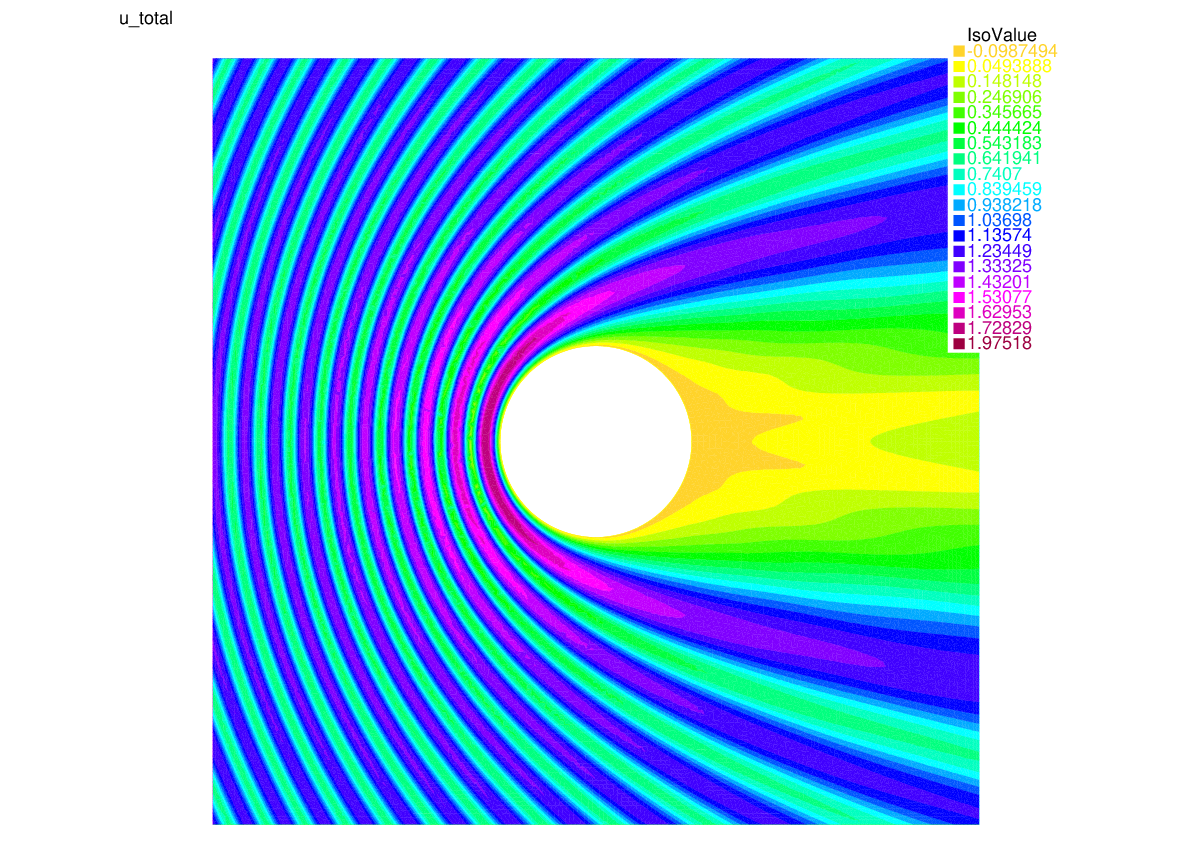
2D example script
Let us summarize what we have learned with a 2D version of our model problem where we study the scattering of a plane wave by a disc:
1load "bem"
2load "msh3"
3
4real k = 10;
5
6int n = 100;
7
8border circle(t = 0, 2*pi){x=cos(t); y=sin(t);}
9meshL ThL = buildmeshL(circle(n));
10ThL = OrientNormal(ThL,unbounded=1);
11
12varf vbem(u,v) = int1dx1d(ThL)(ThL)(BEM(BemKernel("SL",k=k),u,v));
13
14fespace Uh(ThL,P1);
15HMatrix<complex> H = vbem(Uh,Uh);
16
17func uinc = exp(1i*k*x);
18Uh<complex> p, b;
19varf vrhs(u,v) = -int1d(ThL)(uinc*v);
20b[] = vrhs(0,Uh);
21
22p[] = H^-1*b[];
23
24varf vpot(u,v) = int1d(ThL)(POT(BemPotential("SL",k=k),u,v));
25
26int np = 200;
27int R = 4;
28border b1(t=-R, R){x=t; y=-R;}
29border b2(t=-R, R){x=R; y=t;}
30border b3(t=-R, R){x=-t; y=R;}
31border b4(t=-R, R){x=-R; y=-t;}
32mesh ThOut = buildmesh(b1(np)+b2(np)+b3(np)+b4(np)+circle(-n));
33
34fespace UhOut(ThOut,P1);
35HMatrix<complex> HP = vpot(Uh,UhOut);
36
37UhOut<complex> u, utot;
38u[] = HP*p[];
39
40utot = u + uinc;
41plot(utot,fill=1,value=1,cmm="u_total");
BEM for Maxwell’s equations
We can also use the boundary element method to solve the time-harmonic Maxwell’s equations of electromagnetism through the Electric Field Integral Equation (EFIE) formulation. Here again, we present the equations in the context of a scattering problem. We use BemTool notations for the EFIE.
EFIE for the scattering problem
We consider the time convention \(\exp (- \imath \omega t )\). The choice of the time convention as an impact on the formulation.
The problem we consider here is the scattering of an incoming field \((\boldsymbol{E}_{\text{inc}}, \boldsymbol{H}_{\text{inc}})\) by an obstacle \(\Omega\) of boundary \(\Gamma\). Thus, we want to solve the following homogeneous time-harmonic Maxwell’s equations written in terms of the scattered field \((\boldsymbol{E},\boldsymbol{H})\). The obstacle is a perfect electric conductor (PEC) object. The exterior domain corresponds to vacuum space.
where \(\boldsymbol{E}\) is the scattered electric field, \(\boldsymbol{H}\) is the scattered magnetic field, \(\omega\) is the angular frequency, \(\epsilon_{0}\) is the vacuum permittivity and \(\mu_{0}\) is the vacuum magnetic permeability. The angular frequency verifies \(\omega = 2 \pi f\) where \(f\) is the frequency.
The total electric and magnetic fields are given by
We introduce the total magnetic current \(\boldsymbol{j}\) defined on the surface \(\Gamma\):
where \(Z_{0}=\sqrt{\frac{\mu_{0}}{\epsilon_{0}}}\) is the vacuum impedance and \(\kappa= \frac{\omega}{c}\) is the wave number, with \(c=\frac{1}{\sqrt{\mu_{0} \epsilon_{0}}}\) the speed of light.
The current \(\boldsymbol{j}\) verifies the Electric Field Integral Equation (EFIE):
where \(\mathcal{G}_{\kappa}\) is the Green kernel defined in (40).
Note that knowing \(\boldsymbol{j}\), we can compute the scattered field \((\boldsymbol{E},\boldsymbol{H})\) with the Stratton-Chu formula:
The computation of the Stratton-Chu formula is implemented in the BemTool library.
To summarize, the solution of our Maxwell problem can be obtained with the following steps:
Similarly to the scalar case, here we make use of the Maxwell Single Layer Operator \(\mathcal{SL}_\text{MA}\) in Step 1
and the Maxwell Single Layer Potential \(\operatorname{SL}_\text{MA}\) in Step 2
Note
The EFIE formulation in FreeFEM is valid only for a closed boundary \(\Gamma\).
Maxwell BEM problem in FreeFEM
Our Maxwell model problem consists in the electromagnetic scattering of a plane wave at frequency 600 Mhz by a sphere \(\Gamma\) of radius 1. Here we highlight the differences with the scalar case in the FreeFEM script. You can find the full script here.
The sphere \(\Gamma\) is a meshS. We can build the surface mesh with:
1// definition of the surface mesh
2include "MeshSurface.idp"
3real radius = 1;
4int nlambda = 4; // number of points per wavelength
5real hs = lambda/(1.0*nlambda); // mesh size of the sphere
6meshS ThS = Sphere(radius,hs,7,1);
For the discretization of the EFIE, we use the surface Raviart-Thomas Element of order 0 RT0S:
1// fespace for the EFIE
2fespace Uh3(ThS,RT0S);
It is a vector finite element space of size 3. The magnetic current \(\boldsymbol{j}\) belongs to this space:
1Uh3<complex> [mcx,mcy,mcz]; // FE function for the magnetic current
The Single Layer Operator \(\mathcal{SL}_\text{MA}\) involved in the EFIE (47) is defined as a BemKernel with the string "MA_SL":
1BemKernel KerMA("MA_SL",k=k);
We are working in a vector space with 3 components. Hence, the BEM variational form is:
1// definition of the variational form for the EFIE operator
2varf vEFIE([u1,u2,u3],[v1,v2,v3]) =
3 int2dx2d(ThS)(ThS)(BEM(KerMA,[u1,u2,u3],[v1,v2,v3]));
As before, we can use low-rank compression to build a H-Matrix approximation of the discrete bilinear form (see Hierarchical matrices):
1// construction of the H-matrix for the EFIE operator
2HMatrix<complex> H = vEFIE(Uh3,Uh3,eta=10,eps=1e-3,
3 minclustersize=10,maxblocksize=1000000);
The right-hand side of equation (47) can be computed as
1// computation of the rhs of the EFIE
2Uh3<complex> [rhsx,rhsy,rhsz]; // FE function for rhs
3varf vrhs([u1,u2,u3],[v1,v2,v3]) = -int2d(ThS)([v1,v2,v3]'*[fincx,fincy,fincz]);
4rhsx[] = vrhs(0,Uh3);
where [fincx,fincy,fincz] is the incoming plane wave \(\boldsymbol{E}_{inc}\).
We can then solve the linear system to obtain the magnetic current \(\boldsymbol{j}\):
1// solve for the magnetic current
2mcx[] = H^-1*rhsx[];
Following the same steps as in the section Compute the solution, we can reconstruct the scattered electric field \(\boldsymbol{E}\) using the Single Layer Potential \(\operatorname{SL}_\text{MA}\):
1// Maxwell potential for the electric field
2BemPotential PotMA("MA_SL", k=k);
The variational form for the potential is:
1varf vMApot([u1,u2,u3],[v1,v2,v3]) =
2 int2d(ThS)(POT(PotMA,[u1,u2,u3],[v1,v2,v3]));
where [v1,v2,v3] plays the role of the scattered electric field \(\boldsymbol{E}\) that we want to reconstruct at a set of points \([x,y,z]\).
We consider an output mesh ThOut on which we want to reconstruct a P1 approximation of the three components of \(\boldsymbol{E}\):
1fespace UhOutV(ThOut,[P1,P1,P1]);
2// FE function of the scattered field E
3UhOutV<complex> [Ex, Ey, Ez];
We can build the rectangular H-Matrix corresponding to the variational form for the potential:
1HMatrix<complex> HpotMA = vpotMA(Uh3,UhOutV,eta=10,eps=1e-3,
2 minclustersize=10,maxblocksize=1000000);
Finally, the scattered electric field \(\boldsymbol{E}\) can be obtained by performing a matrix-vector product with the potential H-Matrix HpotMA and the discrete magnetic current [mcx,mcy,mcz]:
1// compute the scattered electric field
2Ex[] = HpotMA*mcx[];
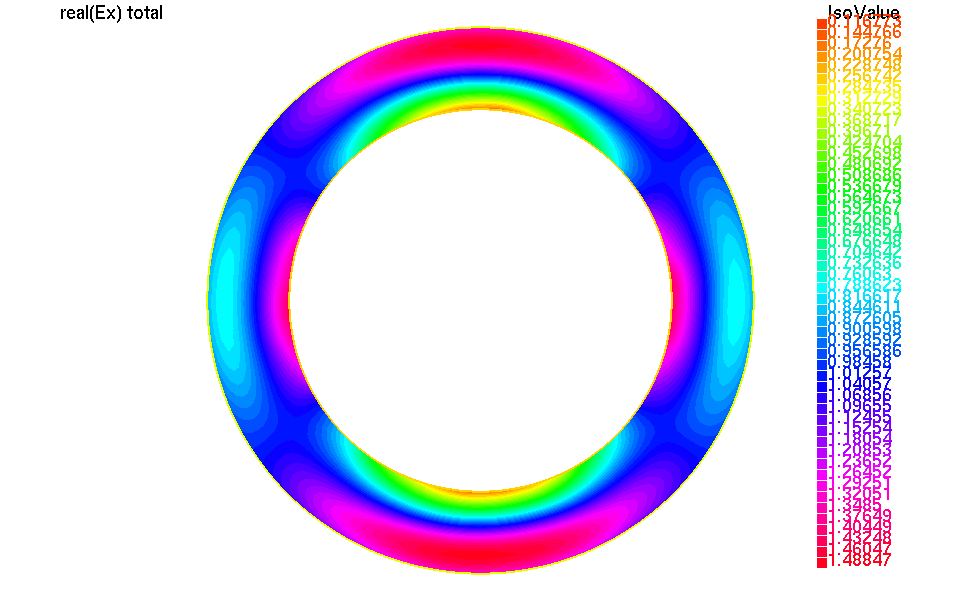
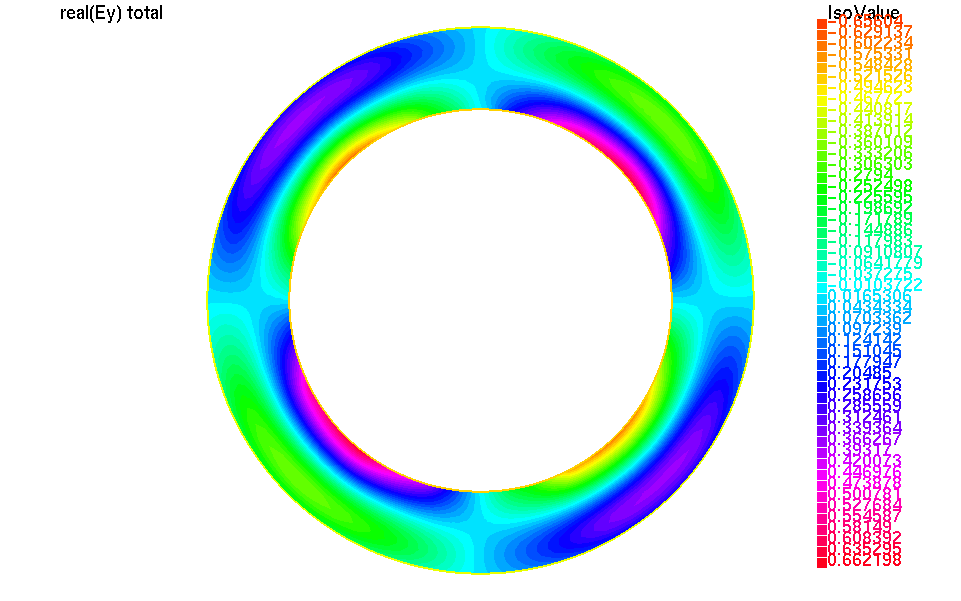
We can plot the real part of the total electric field with:
1// compute the real part of the total electric field
2UhOutV [Etotx,Etoty,Etotz] = [real(Ex+fincx),
3 real(Ey+fincy),
4 real(Ez+fincz)];
5plot([Etotx,Etoty,Etotz]);